Creating new java project with Cloudfoundry and Spring Source Tool
May 20, 2011 Leave a comment
After picking up SpringSource Tool Suite and Installing the Cloudfoundry plugins creating a new java project is painless, as long as you know which options to choose. From the New wizard you need to choose “Dynamic Web Project”

Target runtime at the time of this post was “Cloud Foundry (Runtime) v1.0” and Dynamic web module version “2.5” with a Configuration of “Default Configuration for Cloud Foundry (Runtime) v1.0”

The Project layout

Creating a new Package and class



Create a classic HelloWorld

Time to extend the HttpServlet and override doGet
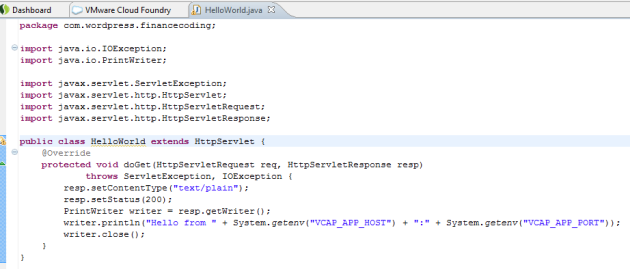
Add entries of the servlet and servlet-mapping

Add Application
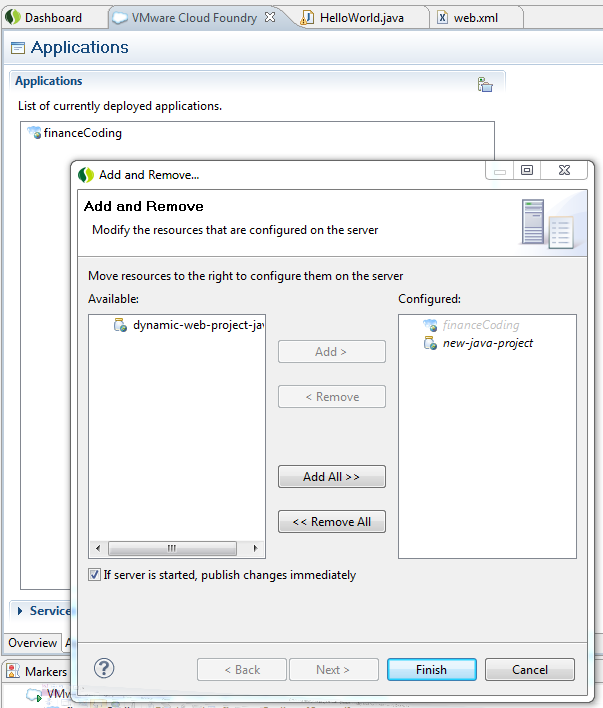
Start the service

And you have the basic hello world from the cloud foundry samples.








